Inferência Causal
Ignorabilidade e sobreposição
Prof. Carlos Trucíos
ctrucios@unicamp.br
ctrucios@unicamp.br
Instituto de Matemática, Estatística e Computação Científica (IMECC),
Universidade Estadual de Campinas (UNICAMP).
Introdução
Introdução
- Até agora, temos discutido como estimar efeitos causais em estudos observacionais assumindo ignorabilidade e sobreposição.
- Contudo, na prática, ambas suposições são bastatnte fortes e são violadas na prática.
- Aprenderemos quais as implicações e como lidar com este problema.
Diagramas
Diagramas
- Diagramas causais ou DAGs (directed acyclic graph) foram introduzidos por Pearl (1995).
- São uma ferramenta valiosa na inferência causal.
- Utilizaremos estes diagramas como uma forma intuitiva de ilustrar as relações causais entre variáveis.
Diagramas
Exemplo 1
Se tivermos o diagrama ao lado e o foco for o efeito causal de \(Z\) sob \(Y\), estamos dizendo que o processo gerador de dados é da forma:
\[\begin{align} &X \sim F_X(x), \\ &Z = f_Z(X, \epsilon_Z), \\ &Y(z) = f_Y(X, z, \epsilon_y(z)), \end{align}\] em que \(\epsilon_Z \perp\!\!\!\perp \epsilon_Y(z)\). Ademais, é fácil ver \(Z \perp\!\!\!\perp Y(z) | X\)
Diagramas
Exemplo 2
\[\begin{align} &X \sim F_X(x), \\ &U \sim F_U(u), \\ &Z = f_Z(X, U, \epsilon_Z), \\ &Y(z) = f_Y(X, U, z, \epsilon_y(z)), \end{align}\] em que \(\epsilon_Z \perp\!\!\!\perp \epsilon_Y(z)\). Ademais, é fácil ver \(Z \perp\!\!\!\perp Y(z) | (X, U)\) (ignorabilidade acontece condicionado em \((X, U)\) mas não condicionado apenas em \(X\)).
\(U\) é uma variável de confusão não medida.
Avaliando inconfundibilidade
Avaliando inconfundibilidade
A suposição de ignorabilidade (também conhecida, inconfundibilidade) é dada por \[Z \perp\!\!\!\perp Y(1) | X \quad e \quad Z \perp\!\!\!\perp Y(0) | X,\] o que implica que \[\begin{align} P(Y(1) | Z = 1, X) & = P(Y(1) | Z = 0, X), \\ P(Y(0) | Z = 1, X) & = P(Y(0) | Z = 0, X). \end{align}\]
Ou seja, que as distribuições dos contrafactuais \(P(Y(1) | Z = 0, X)\) e \(P(Y(0) | Z = 1, X)\) sejam as mesmas do que as distribuições dos factuais \(P(Y(1) | Z = 1, X)\) e \(P(Y(0) | Z = 0, X)\)!.
Avaliando inconfundibilidade
- Sem suposições adicionais, não é possível testar a suposição de ignorabilidade.
- Contudo, aprenderemos duas estratégias para avaliar a suposição de ignorabilidade:
- negative outcomes
- negative exposures
Avaliando inconfundibilidade: negative outcomes
- Suponha que \(Yn\) é similar a \(Y\) (idealmente, compartilha a mesma estrutura de confusão).
- Se \(Z \perp\!\!\!\perp Y(z) | X\) então \(Z \perp\!\!\!\perp Yn(z) | X\)
- \(Yn\) deve ser de tal forma que conheçamos, a priori, o efeito de \(Z\) sob \(Yn\): \[\tau(Z \rightarrow Yn) = \mathbb{E}[Yn(1) - Yn(0)],\] sendo um exemplo importante quanto \(\tau(Z \rightarrow Yn) = 0.\)
- Qual seria um diagrama que satisfaz esses requerimentos?
Avaliando inconfundibilidade: negative outcomes
Avaliando inconfundibilidade: negative outcomes
Exemplo 1
Cornfield et al. (1959) estudaram o efeito de fumar cigarros no câncer de pulmão através de um estudo observacional. Os autores incluiram diversar covariáveis mas ainda existe a possibilidade de termos uma variável de confusão não medida que pode causar vies no efeito observado.
Para fortalecer as evidências de causalidade, os autores também reportaram o efeito de fumar cigarros sob accidentes de auto (que foi perto de zero, como esperado). Assim, as análises baseadas no negative outcomes fazem com que a evidência de causalidade entre fumar cigarros no câncer de pulmão de torne-se mais forte.
Avaliando inconfundibilidade: negative outcomes
Exemplo 2
Imbens e Rubin (2015) sugerem utilizar o resultado defasado como negative outcome.
Em muitos casos, é razoável acreditar que o resultado defasado e o resultado tem a mesma estrutura de confusão.
Como o resultado defasado acontece antes do tratamento, o efeito causal médio deve ser 0.
Avaliando inconfundibilidade: negative outcomes
Exemplo 3
Um estudo observacional com pessoas idosas mostrou que vacina contra a influenza reduz o risco de pneumonia/hospitalização por influenza, bem como mortalidade (por todas as causas) na temporarada seguinte.
Jackson et al. (2006), duvidando das conclusões, realizam uma análise suplementar com negative outcomes.
Vacinação começa outono e a transmisão da influenza é minima até o inverno. Assim, o efeito da vacinação deve ser mais proominente durante a época de influenza. Contudo, Jackson et al. (2006) encontram um efeito maior antes do período de influenza, sugerindo que o efeito observado é, na verdade, devido a variáveis de confusão não observadas.
Negative outcomes é uma estratégia interessante. Contudo, encontrar \(Yn\) não é trivial e precisa de um amplo conhecimento do problema em estudo.
Avaliando inconfundibilidade: negative expousures
- Assuma que \(Zn\) é similar a \(Z\) (idealmente compartilha a mesma estrutura de confusão).
- Se \(Z \perp\!\!\!\perp Y(z) | X\) então \(Zn \perp\!\!\!\perp Y(z) | X\)
- Ademais, conhecemos, a priori, o efeito de \(Zn\) sob \(Y\): \[\tau(Zn \rightarrow Y) = \mathbb{E}[Y(1^n) - Y(0^n)].\]
- Um exemplo importante é quando \(\tau(Zn \rightarrow Y) = 0\). Qual seria o dirgamra que satisfaz estes requerimentos?
Avaliando inconfundibilidade: negative expousures
Avaliando inconfundibilidade: negative expousures
Exemplo 4
Sanderson et al. (2017) dão muitos exemplos de negative expousures na determinação do efeito da exposição intrauterina nos resultados posteriores. Eles comparam a associação da exposição materna durante a gravidez com o resultado de interesse, com a associação da exposição paterna com o mesmo resultado. Eles revisam estudos sobre o efeito do tabagismo materno e paterno nos resultados dos filhos, e estudos sobre o efeito do IMC materno e paterno no IMC dos filhos e no transtorno do espectro autista. Nestes exemplos, esperamos que a associação da exposição materna (\(Z\)) com o resultado seja maior do que a da exposição paterna (\(Zn\)) com resultado.
Avaliando inconfundibilidade:
Alguns comentários:
- Testar inconfundibilidade não é possível, mas podemos utilizar negative outcomes ou negative exposures como análise suplementar a fortalecer a nossa evidência sobre causalidade.
- Contudo, utilizar esta abordagem não é trivial, principalmente, por dois motivos:
- Requer mais dados (que nem sempre teremos)
- Requer um amplo conhecimento do problema em análise para saber escolher bem \(Yn\) ou \(Zn\).
Sobreajuste
Sobreajuste
Nas aulas anteriores discutimos como estimar efeitos causais sob e suposição de inconfundibilidade ou ignorabilidade:
\[Z \perp\!\!\!\perp \{ Y(1), Y(0) \} | X\]
- Todas as variáveis pre-tratamento [Rosembaum (2002) e Rubin (2007)].
- Contudo, não todos concordam com esta abordagem. De fato, Pearl da dois contraexemplos.
Sobreajuste
M-vies
M-vies aparece no seguinte DAG (com forma de “M”).
em que \(X\) é observado mas \(U1\) e \(U2\) não são.
Sobreajuste
M-vies
- \(U1 \perp\!\!\!\perp U2\),
- \(Z = f_Z(U1, \epsilon_z)\),
- \(X = f_X(U1, U2, \epsilon_x)\),
- \(Y = Y(z) = f_Y(U2, \epsilon_y)\),
- \((\epsilon_z, \epsilon_x, \epsilon_y)\) são termos aleatórios independentes.
Note que se mudarmos o valor de \(Z\), o valor de \(Y\) não muda. Ou seja, o verdadeiro efeito causal de de \(Z\) sob \(Y\) é zero.
Sobreajuste
M-vies
Ademais, \[\tau_{PF} = \mathbb{E}[Y | Z = 1] - \mathbb{E}[Y | Z = 0] = 0\]
Isto significa que, sem ajustar por covariáveis, teremos um estimador não viesado para o verdadeiro valor do parâmetro.
Sobreajuste
M-vies
Suponha que:
- \(X = aU_1 + b U_2 + \epsilon_X\),
- \(Z = cU_1 + \epsilon_Z\),
- \(Y = dU_2 + \epsilon_Y\),
- \((U_1, U_2, \epsilon_X, \epsilon_Z, \epsilon_Y) \sim N(0,1)\)
\[\mathbb{C}ov(Z, Y) = \mathbb{C}ov(cU_1 + \epsilon_Z, dU_2 + \epsilon_Y) = 0\]
Contudo, \[\rho_{ZY|X} = \dfrac{\rho_{ZY} - \rho_{ZX}\rho_{YX}}{\sqrt{1 - \rho^2_{ZX}} \sqrt{1 - \rho^2_{YX}}} \propto -\mathbb{C}ov(Z, X) \mathbb{C}ov(Y, X) \propto -abdc\]
Sobreajuste
M-vies
Code
[1] 0.001 -0.199Ou seja, neste caso, condicionar por todas as covariáveis pre-tratamento não é benéfico 😢.
Em geral, quando o PGD é da forma do diagrama apresentado anteriormente (com forma de “M”), condicionar por todas as covariáveis pre-tratamento causará um vies.
Sobreajuste
Z-vies
Consideremos o seguinte diagrama causal:
Sobreajuste
Z-vies
Suponha que:
- \(Z = aX + bU + \epsilon_Z,\)
- \(Y(z) = \tau z + cU + \epsilon_y\)
- \((U, X, \epsilon_Z, \epsilon_Y) \sim N(0,1)\)
\[\tau_{unAdj} = \dfrac{\mathbb{C}ov(Z, Y)}{\mathbb{V}(Z)} = \tau + \dfrac{bc}{a^2 + b^2 + 1}\]
\[\tau_{Adj} = \tau + \dfrac{bc}{b^2 + 1}\]
Sobreajuste
Z-vies
Code
[1] 0.333 0.499Code
[1] 0.037 0.499Code
[1] 0.010 0.498Ou seja, neste caso, condicionar por todas as covariáveis pre-tratamento não é benéfico 😭.
Sobreajuste
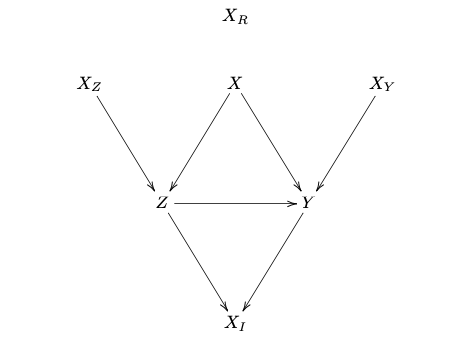
Sobreajuste
- \(X\) afeta tanto \(Z\) quanto \(Y\). Condicionar em \(X\) garante ignorabilidade. Assim, devemos controlar por \(X\).
- \(X_R\) é um ruido e não afeta nem \(Z\) nem \(Y\). Incluir \(X_R\) não trará vies mas aumentará a variância (o velho problema de inclur variáveis irrelevantes)
- \(X_Z\) afeta o resultado apenas através de \(Z\). Incluí-lo na análise não trará vies mas aumentará a variância. Contudo, com variáveis de confusão não medidas, aumenta o vies.
- \(X_Y\) afeta o resultado mas não o tratamento. Sem condicional nela, ignorabilidade ainda acontece. Como ela é preditiva do resultado, incluí-la aumentará a precisão.
- \(X_I\) é afetada pelo tratamento e pelo resultado (é uma variável pós-tratamento, não pre-tratamento). Não devemos incluir esta variável.
Referências
- Peng Ding (2023). A First Course in Causal Inference. Capítulo 16.
- Lipsitch, M., Tchetgen, E. T., & Cohen, T. (2010). Negative controls: a tool for detecting confounding and bias in observational studies. Epidemiology, 21(3), 383-388.
Carlos Trucíos (IMECC/UNICAMP) | ME920/MI628 - Inferência Causal | ctruciosm.github.io